Понедельник, 29.04.2024, 01:01
Решебник-сайт
|
Меню сайта
Календарь
|
ТММТеория механизмов и машин (ТММ)
Учебники и примеры решения задач по приведенным ниже ссылкам можно скачать бесплатно без регистрации
1. Структурный анализ механизмов
Механизм – искусственно созданная система тел, предназначенная для преобразования движения одного или нескольких тел в требуемые движения других тел.
Звено механизма – каждое из тел, входящих в состав механизма, состоящее часто из комплекса неподвижно сочлененных между собой деталей.
Звено механизма может быть:
- жесткое;
- упругое (пружины, рессоры, металлорезиновые соединения и др. Воздух или газ, заключенный в пространстве с переменным объёмом, необходимо также рассматривать как упругое звено);
- гибкое (канаты, ремни, цепи).
Входные звенья – звенья механизма, которым сообщается движение, преобразуемое в требуемое движение других звеньев механизма.
Выходные звенья – звенья механизма, совершающие требуемое движение, для которого предназначен механизм.
Остальные звенья механизма называются соединительными (промежуточными).
Ведущее звено механизма – звено, для которого сумма элементарных работ всех внешних сил, приложенных к нему, является положительной.
Ведомое звено механизма – звено, для которого сумма элементарных работ всех внешних сил, приложенных к нему, является отрицательной.
В большинстве случаев входное звено является и ведущим.
Кинематическая пара – соединение двух соприкасающихся звеньев, допускающее их относительное движение.
Элемент кинематической пары – точка, линия или поверхность одного звена, входящая в соприкосновение с другим звеном.
Кинематические пары механизмов классифицируют:
1) по количеству условий связи в относительном движении звеньев (по Малышеву А.П.).
Пространственные кинематические пары можно разделить на 5 классов:
1 класс – уничтожается одно возможное относительное движение звеньев,
2 класс – уничтожается два возможных относительных движений звеньев и т.д.
2) по числу оставшихся степеней свободы (по Добровольскому В.В.)
Кинематическая пара I рода – осталась неуничтоженной одна степень свободы в относительном движении звеньев.
Кинематическая пара II рода - остались неуничтоженными две степени свободы в относительном движении звеньев и т.д.
По характеру соприкосновения элементов кинематические пары подразделяются на:
- низшие кинематические пары (элементы кинематической пары представляют собой взаимно облегающие поверхности или отдельные их части);
- высшие кинематические пары (элементы кинематической пары касаются в точке или по линии).
Кинематическая цепь – совокупность некоторого количества звеньев, соединенных при помощи кинематических пар последовательно или разветвлено.
Кривошип – звено, которое может совершать полный оборот вокруг неподвижной оси.
Коромысло – звено, которое совершает неполный оборот вокруг неподвижной оси.
Ползун – звено, образующее поступательную пару со стойкой.
Шатун – звено, которое не образует кинематических пар со стойкой; совершает сложное движение.
Кулиса – подвижное звено рычажного механизма, образующее поступательную пару с другим подвижным звеном – кулисным камнем.
Избыточные связи – повторяющиеся связи, которые можно удалить, сохранив при этом заданное число степеней свободы.
Структурный синтез механизмов – проектирование структурной схемы механизма, под которой понимается схема механизма, указывающая стойку, подвижные звенья, виды кинематических пар и их взаимное расположение.
План положений механизма – изображение кинематической схемы механизма в выбранном масштабе, соответствующее определенному положению начального звена (начальных звеньев).
Группа Асура – кинематическая цепь с нулевой степенью свободы относительно тех звеньев, с которыми входят в кинематические пары свободные элементы её звеньев, и не распадающаяся на более простые цепи, обладающие также нулевой степенью свободы.
Класс структурной группы определяется числом кинематических пар, образующих наиболее сложный замкнутый контур группы.
Порядок структурной группы определяется числом элементов звеньев, которыми она присоединяется к имеющемуся механизму.
примеры структурного анализа механизмов см. ниже в разделе "кинематический анализ механизмов"
(выполнен структурный анализ + кинематический анализ).
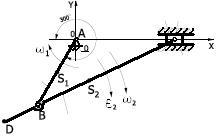
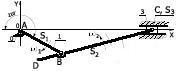
2. Кинематический анализ механизмов (план скоростей, план ускорений)
План скоростей механизма – чертеж, на котором изображены в виде отрезков векторы, равные по модулю и по направлению скоростям различных точек звеньев механизма в данный момент.
План ускорений механизма – чертеж, на котором изображены в виде отрезков векторы, равные по модулю и направлению ускорениям различных точек звеньев механизма в данный момент.
Абсолютное движение – движение точки или тела по отношению к основной системе отсчета.
Относительное движение – движение точки или тела по отношению к подвижной системе отсчета.
Переносное движение – движение подвижной системы отсчета по отношению к основной системе отсчета.
Теорема сложения скоростей при сложном движении точки:
Абсолютная скорость точки равна геометрической сумме переносной и относительной скоростей этой точки.
Аналог скорости точки – первая производная радиуса-вектора точки по обобщенной координате механизма.
Аналог ускорения точки – вторая производная радиуса-вектора точки по обобщенной координате механизма.
3. Силовой анализ механизмов (реакции в кинематических парах, уравновешивающая сила, уравновешивающий момент)
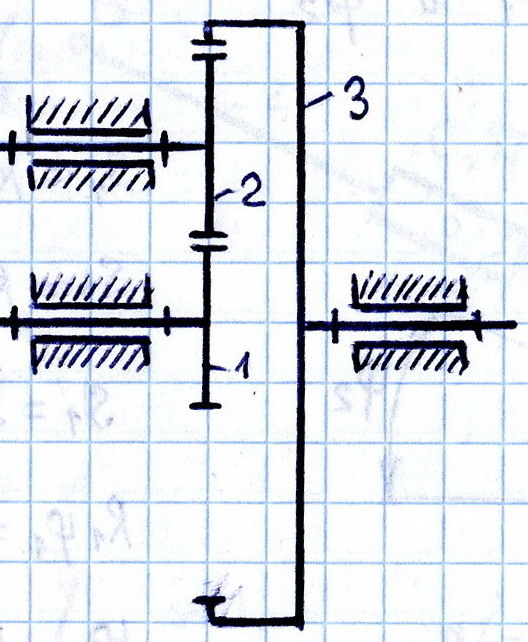
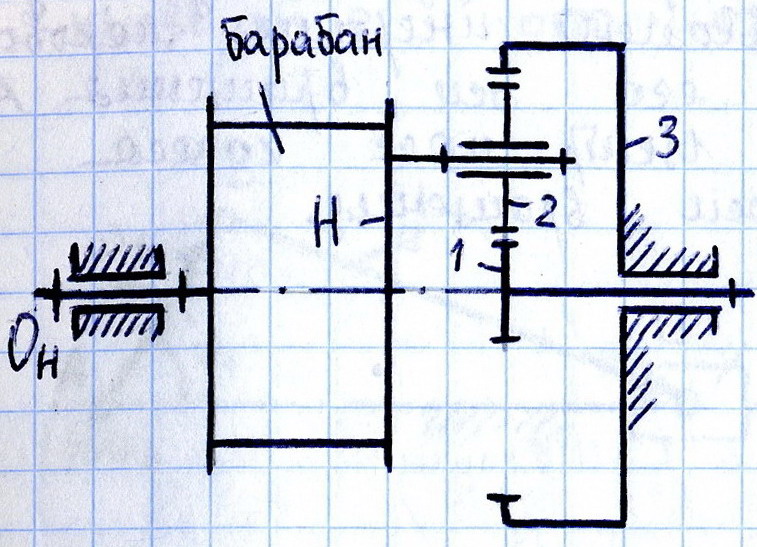
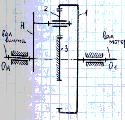
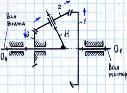
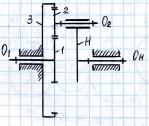
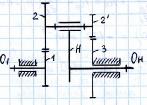
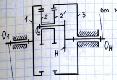
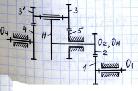
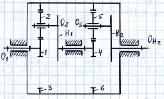
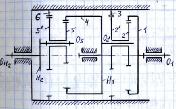
5. Планетарные и дифференциальные редукторы (передаточное отношение)
страница находится в разработке и будет пополнена новыми материалами
|
Наш опрос
Друзья сайта
Статистика
Онлайн всего: 1 Гостей: 1 Пользователей: 0 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||


Copyright ReshusamCorp © 2024
